- Accomplished this past week
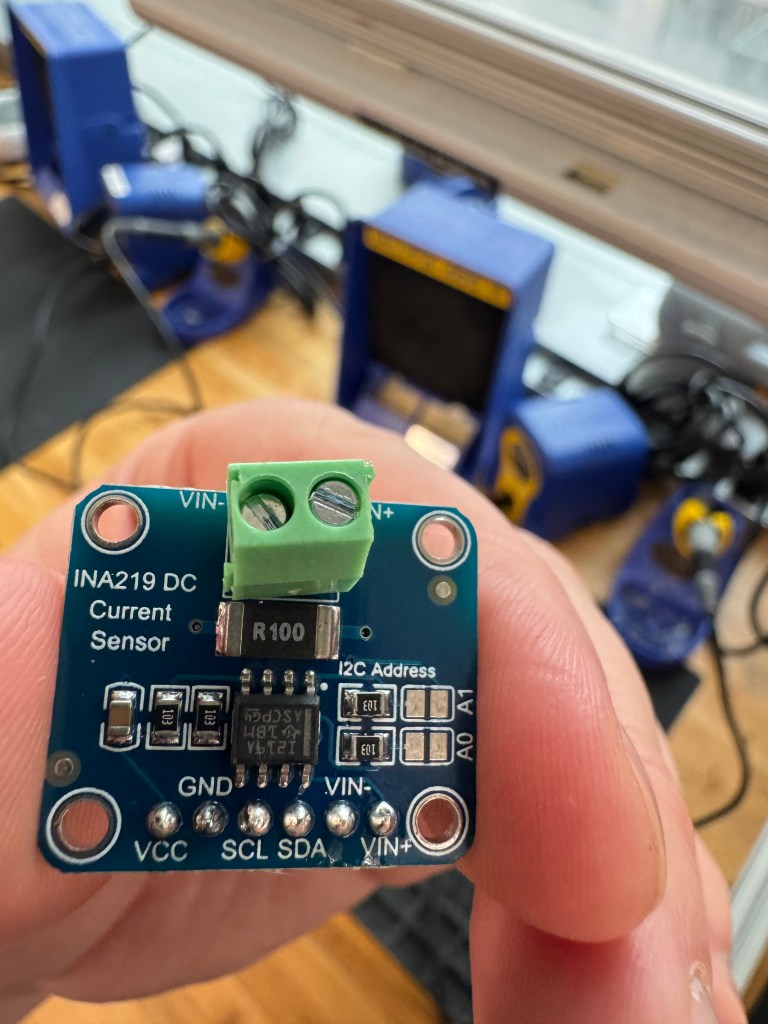
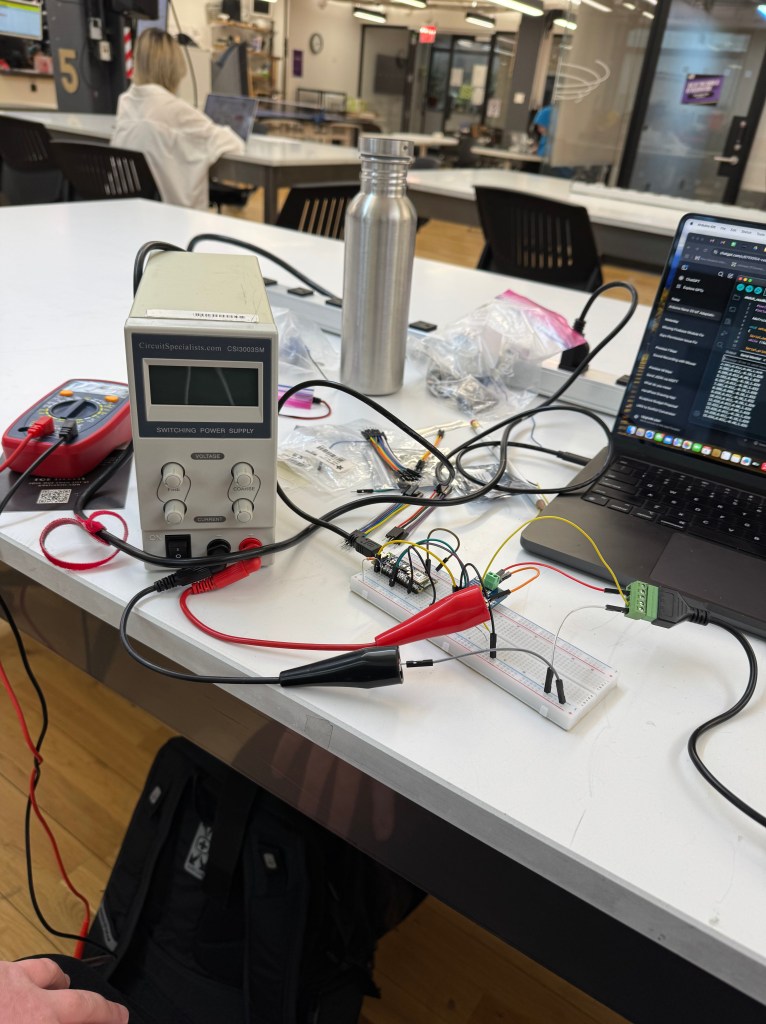
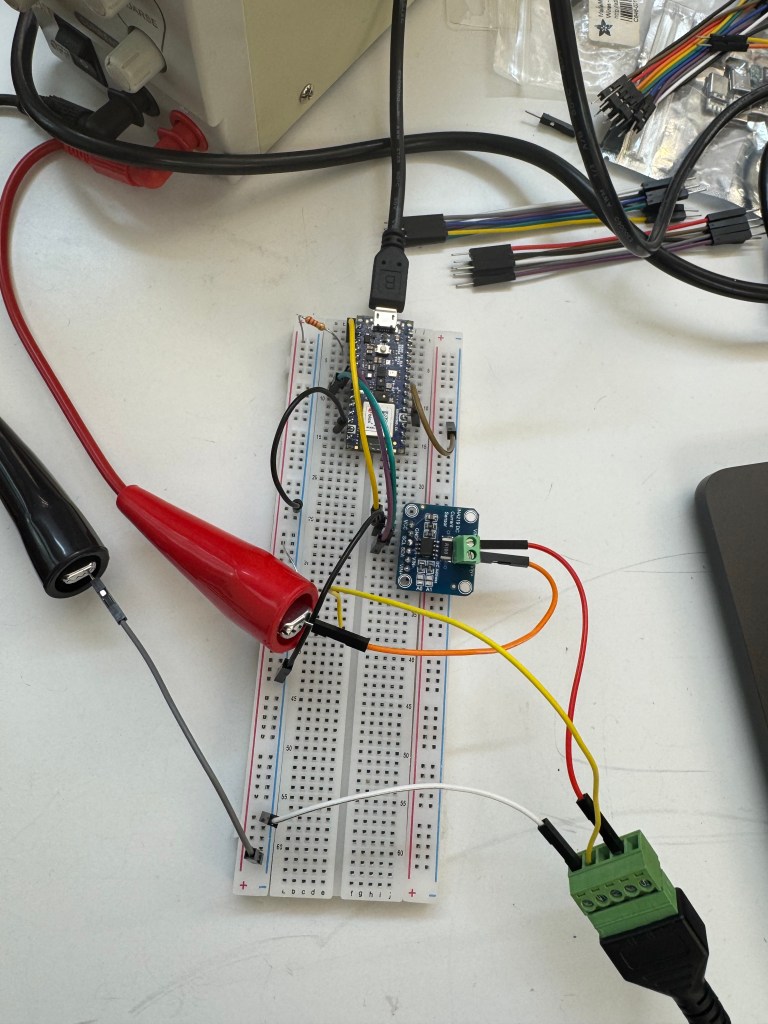
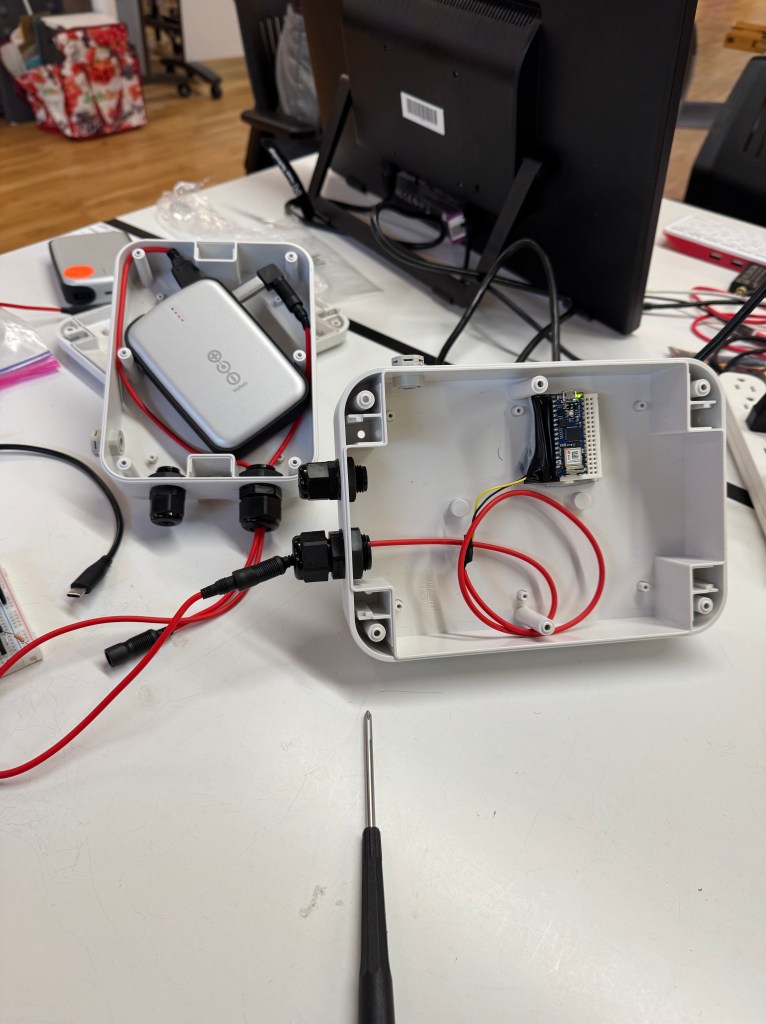
- Implemented USB-C circuit that can read voltage level of Voltaic battery
- Discovered issue with Arduino timing out was not battery related but meant that we needed to pay $7 for Shiftr
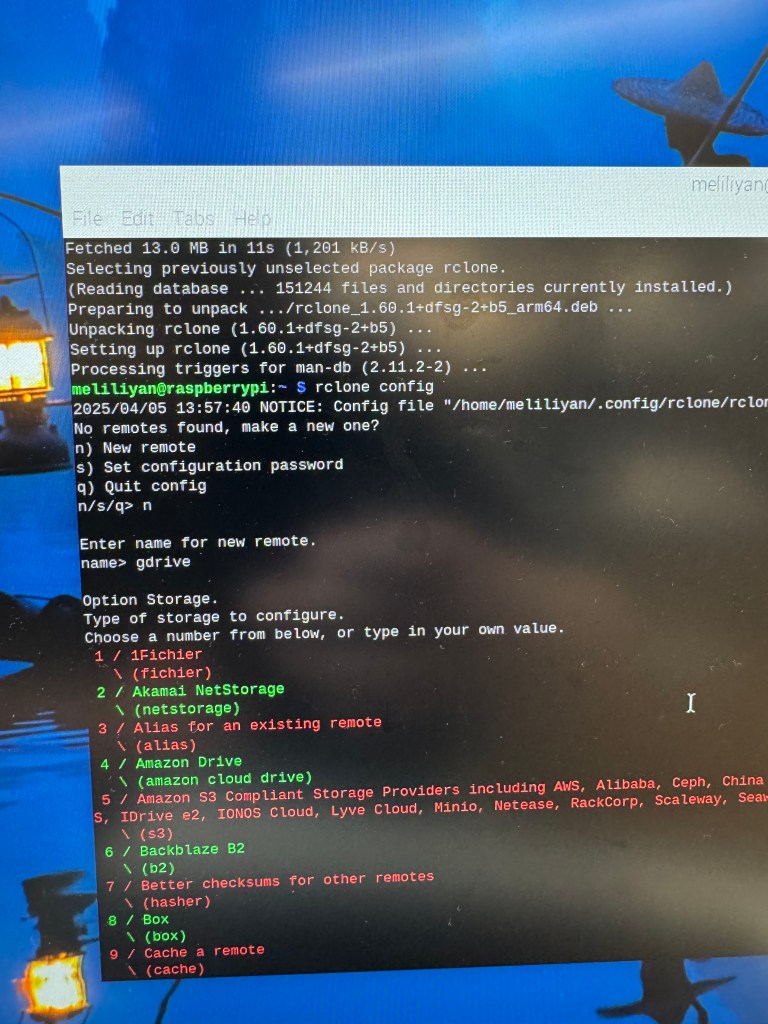
- Linked Google Drive to Raspberry Pi via Google Cloud Console and Pi CLI
- Developed python script for Pi to run on startup
- Figured out how to wire two solar panels in parallel together
- Discussed website design/experience
- Ordered parts for antenna after revising design
- Next Steps
Accomplished this past week
Implemented USB-C circuit that can read voltage level of Voltaic battery


Discovered issue with Arduino timing out was not battery related but meant that we needed to pay $7 for Shiftr

Linked Google Drive to Raspberry Pi via Google Cloud Console and Pi CLI
–checked out a Pi from the shop
–followed this really helpful article about mounting google drive to a Raspberry Pi: https://medium.com/@artur.klauser/mounting-google-drive-on-raspberry-pi-dd15193d8138
–Also consulted the rclone documentation on Google Drive/Linux: https://rclone.org/drive/
–found that a Pi 5 takes 3 minutes or so to upload a 281MB .wav file to Google Drive. If that uses 3 watts at peak based on previous measurements and the battery has 48 watthours, we will need our panels hooked together to ensure the Pi works smoothly.
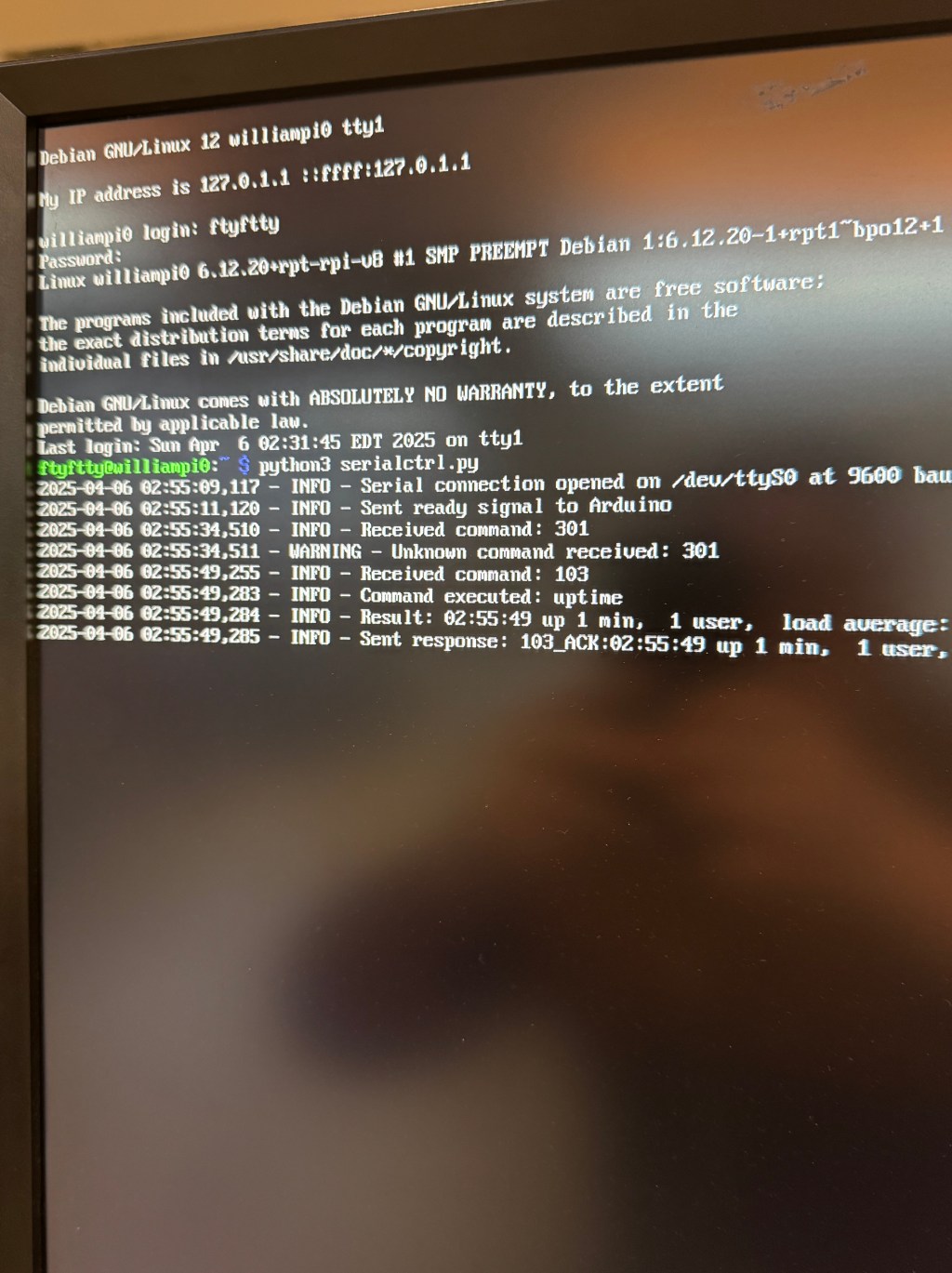
Developed and cemented code responsible for Arduino (C++) and Pi (python) to communicate with MQTT -> Serial (with aid from Claude.ai)
Arduino code:
#include <WiFiNINA.h>
#include <ArduinoMqttClient.h>
#include "arduino_secrets.h"
// MQTT setup
WiFiClient wifi;
MqttClient mqttClient(wifi);
// MQTT connection details
char broker[] = "energyctrlserver.cloud.shiftr.io";
int port = 1883;
char topic[] = "status";
String clientID = "Arduino";
// Pi communication state
bool piReady = false;
void setup() {
pinMode(12, OUTPUT); // For Pi power control
// Initialize serial communications
Serial.begin(9600); // Debug serial
Serial1.begin(9600); // Serial for Pi communication
// Wait for serial monitor to open
if (!Serial) delay(3000);
Serial.println("Starting...");
// Connect to WiFi
connectToNetwork();
// Make the clientID unique with MAC address
byte mac[6];
WiFi.macAddress(mac);
for (int i = 0; i < 3; i++) {
clientID += String(mac[i], HEX);
}
// Set MQTT credentials
mqttClient.setId(clientID);
mqttClient.setUsernamePassword(SECRET_MQTT_USER, SECRET_MQTT_PASS);
// Clear any data in the serial buffer
while (Serial1.available()) {
Serial1.read();
}
Serial.println("Setup complete. Waiting for Pi to become ready...");
publishStatus("Arduino initialized. Waiting for Pi...");
}
void loop() {
// Check WiFi connection
if (WiFi.status() != WL_CONNECTED) {
connectToNetwork();
return;
}
// Check MQTT broker connection
if (!mqttClient.connected()) {
Serial.println("Attempting to connect to broker");
connectToBroker();
}
// Poll for new MQTT messages
mqttClient.poll();
// Check for Pi messages
checkPiMessages();
// Process MQTT commands only if Pi is ready
// Otherwise, we're in initialization or waiting state
delay(10); // Small delay to prevent busy-wait
}
void checkPiMessages() {
if (Serial1.available() > 0) {
String message = Serial1.readStringUntil('\n');
message.trim(); // Remove any whitespace, CR, LF
Serial.print("Received from Pi: [");
Serial.print(message);
Serial.println("]");
// Check for Pi ready message if not already confirmed
if (!piReady && message.indexOf("Pi ready") >= 0) {
piReady = true;
Serial.println("Pi is now ready for communication!");
publishStatus("Pi is ready for communication");
}
// Process Pi response
if (piReady) {
// Report the message via MQTT
publishStatus("Pi message: " + message);
// Parse response for specific commands if needed
if (message.indexOf("103_ACK") >= 0) {
// This is a response to status request
publishStatus("Pi status received: " + message);
} else if (message.indexOf("104_ACK") >= 0) {
// This is a response to shutdown command
publishStatus("Pi shutdown acknowledged: " + message);
}
}
}
}
void publishStatus(String message) {
if (mqttClient.connected()) {
mqttClient.beginMessage(topic);
mqttClient.print(message);
mqttClient.endMessage();
Serial.println("Published: " + message);
}
}
void connectToNetwork() {
Serial.println("Connecting to WiFi...");
while (WiFi.status() != WL_CONNECTED) {
Serial.println("Attempting to connect to: " + String(SECRET_SSID));
WiFi.begin(SECRET_SSID, SECRET_PASS);
delay(5000);
}
Serial.print("Connected. IP address: ");
Serial.println(WiFi.localIP());
digitalWrite(LED_BUILTIN, HIGH);
}
boolean connectToBroker() {
if (!mqttClient.connect(broker, port)) {
Serial.print("MQTT connection failed. Error: ");
Serial.println(mqttClient.connectError());
return false;
}
mqttClient.onMessage(onMqttMessage);
Serial.print("Subscribing to topic: ");
Serial.println(topic);
mqttClient.subscribe(topic);
// Send connection status
publishStatus("Arduino connected to MQTT");
return true;
}
void onMqttMessage(int messageSize) {
// Read the message
String incoming = "";
while (mqttClient.available()) {
incoming += (char)mqttClient.read();
}
Serial.print("MQTT received: ");
Serial.println(incoming);
// Only process numeric codes
int code = incoming.toInt();
if (code == 101) {
reply101();
}
if (code == 102) {
turnonpi();
}
// Process commands only if Pi is ready
if (piReady) {
if (code == 103) {
statuspi();
}
else if (code == 104) {
shutdownpi();
}
else if (code > 0) {
// Forward code to Pi
sendToPi(incoming);
}
}
//else {
// // Pi not ready yet
// publishStatus("Cannot process command, Pi not ready");
// }
}
void reply101() {
publishStatus("301");
Serial.println("Status reported: 301");
}
void turnonpi() {
Serial.println("Turning on Pi");
digitalWrite(12, HIGH);
publishStatus("Pi Booting");
// Reset Pi ready flag - we'll wait for new ready signal
piReady = false;
}
void statuspi() {
Serial.println("Requesting Pi status");
sendToPi("103");
}
void shutdownpi() {
Serial.println("Sending shutdown command to Pi");
sendToPi("104");
// Reset Pi ready flag since it's shutting down
piReady = false;
publishStatus("Pi shutting down, communication disabled");
}
void sendToPi(String command) {
// Only send if Pi is ready
if (piReady) {
Serial.print("Sending to Pi: ");
Serial.println(command);
// Add newline as command terminator
Serial1.print(command);
Serial1.print('\n');
Serial1.flush(); // Ensure transmission completes
publishStatus("Command sent to Pi: " + command);
} else {
Serial.println("Cannot send command, Pi not ready");
publishStatus("Command failed, Pi not ready");
}
}Pi Code:
#!/usr/bin/env python3
import serial
import time
import subprocess
import logging
import os
import signal
import sys
# Configure logging
logging.basicConfig(
level=logging.INFO,
format='%(asctime)s - %(levelname)s - %(message)s',
handlers=[
logging.FileHandler("/home/pi/serial_handler.log"),
logging.StreamHandler()
]
)
# Serial port configuration
SERIAL_PORT = '/dev/serial0' # Hardware UART on Pi
BAUD_RATE = 9600
# Command dictionary - maps codes to terminal commands and responses
COMMANDS = {
"103": {
"command": "uptime", # Get system uptime
"response": "103_ACK",
"params_required": 0
},
"104": {
"command": "sudo shutdown -h now",
"response": "104_ACK",
"params_required": 0
},
# Add more commands as needed
}
def execute_command(cmd):
"""Execute a shell command and return the output"""
try:
# Special handling for shutdown command
if "shutdown" in cmd:
logging.info(f"Executing shutdown command: {cmd}")
# Return immediately for shutdown command
subprocess.Popen(cmd, shell=True)
return "Shutdown initiated"
# Normal command execution
result = subprocess.check_output(cmd, shell=True, text=True, timeout=5)
logging.info(f"Command executed: {cmd}")
return result.strip()
except subprocess.TimeoutExpired:
return "Command timed out"
except subprocess.CalledProcessError as e:
logging.error(f"Command failed: {e}")
return f"Error: {e}"
def signal_handler(sig, frame):
"""Handle SIGTERM and SIGINT for clean shutdown"""
logging.info("Shutdown signal received, exiting...")
if 'ser' in globals() and ser.is_open:
ser.close()
sys.exit(0)
def main():
global ser
# Set up signal handlers for clean shutdown
signal.signal(signal.SIGTERM, signal_handler)
signal.signal(signal.SIGINT, signal_handler)
try:
# Open serial connection with explicit settings
ser = serial.Serial(
port=SERIAL_PORT,
baudrate=BAUD_RATE,
bytesize=serial.EIGHTBITS,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
timeout=1
)
logging.info(f"Serial connection opened on {SERIAL_PORT} at {BAUD_RATE} baud")
# Clear any initial data
ser.reset_input_buffer()
ser.reset_output_buffer()
# Send ready signal to Arduino
time.sleep(2) # Short delay to ensure things are settled
ready_message = "Pi ready\n"
ser.write(ready_message.encode('ascii'))
logging.info("Sent ready signal to Arduino")
# Buffer to store incoming data
buffer = ""
while True:
# Read data if available
if ser.in_waiting > 0:
try:
# Read a line (until newline character)
line = ser.readline().decode('ascii', errors='replace').strip()
if line: # Only process non-empty lines
logging.info(f"Received command: {line}")
# Process the command
if line in COMMANDS:
cmd_info = COMMANDS[line]
cmd_output = execute_command(cmd_info["command"])
# Send response
response = f"{cmd_info['response']}:{cmd_output[:50]}\n"
ser.write(response.encode('ascii'))
logging.info(f"Sent response: {response.strip()}")
else:
# Unknown command
ser.write(f"UNKNOWN_CODE:{line}\n".encode('ascii'))
logging.warning(f"Unknown command received: {line}")
except Exception as e:
logging.error(f"Error processing command: {e}")
# Small delay to prevent CPU hogging
time.sleep(0.1)
except KeyboardInterrupt:
logging.info("Program terminated by user")
except Exception as e:
logging.error(f"Error: {e}")
finally:
if 'ser' in locals() and ser.is_open:
ser.close()
logging.info("Serial connection closed")
if __name__ == "__main__":
main()Developed python script for Pi to run on startup
.Sh Code:
#!/bin/bash
# Define file path and content
FILE_PATH="/home/meliliyan/Desktop/test_file.txt"
FILE_CONTENT="test hello"
GDRIVE_PATH="gdrive:'nyu classes'" # Assuming gdrive is the name of your rclone remote
LOG_FILE="/home/meliliyan/Desktop/startup_log.txt"
#Create log function
log() {
echo "$(date): $1" >> "$LOG_FILE"
}
log "Starting startup script execution"
# Step 1: Create a file and write "test" to it
echo "$FILE_CONTENT" > "$FILE_PATH"
log "Created file $FILE_PATH with content '$FILE_CONTENT'"
# Step 2: File is automatically saved when written
log "File saved"
# Step 3: Wait a bit to ensure network is up
log "Waiting 30 seconds for network to be fully ready"
sleep 30
log "Proceeding with rclone copy"
# add full path to rclone to ensure
export PATH=$PATH:/usr/bin:/usr/local/bin
log "PATH set to: $PATH"
CONFIG_FILE="/home/meliliyan/.config/rclone/rclone.conf"
log "Using rclone config: $CONFIG_FILE"
# send file to google drive with error handling
log "Attempting to copy file to Google Drive"
sudo -u meliliyan /usr/bin/rclone copy "$FILE_PATH" "$GDRIVE_PATH" --config="$CONFIG_FILE" --verbose >> "$LOG_FILE" 2>&1
RCLONE_EXIT_CODE=$?
if [ $RCLONE_EXIT_CODE -eq 0 ]; then
log "rclone copy succeeded with exit code: $RCLONE_EXIT_CODE"
else
log "rclone copy failed with exit code: $RCLONE_EXIT_CODE"
#diagnostic info
log "rclone version info"
/usr/bin/rclone version >> "$LOG_FILE" 2>&1
log "Network status:"
ping -c 4 8.8.8.8 >> "$LOG_FILE" 2>&1
log "Remotes configured:"
sudo -u meliliyan /usr/bin/rclone --config="$CONFIG_FILE" listremotes >> "$LOG_FILE" 2>&1
fi
# Step 4: Shutdown the Pi
if [ $RCLONE_EXIT_CODE -eq 0 ]; then
log "all done. shutting down system"
#/sbin/shutdown -h now
else
log "Not shutting down to rclone failure"
fi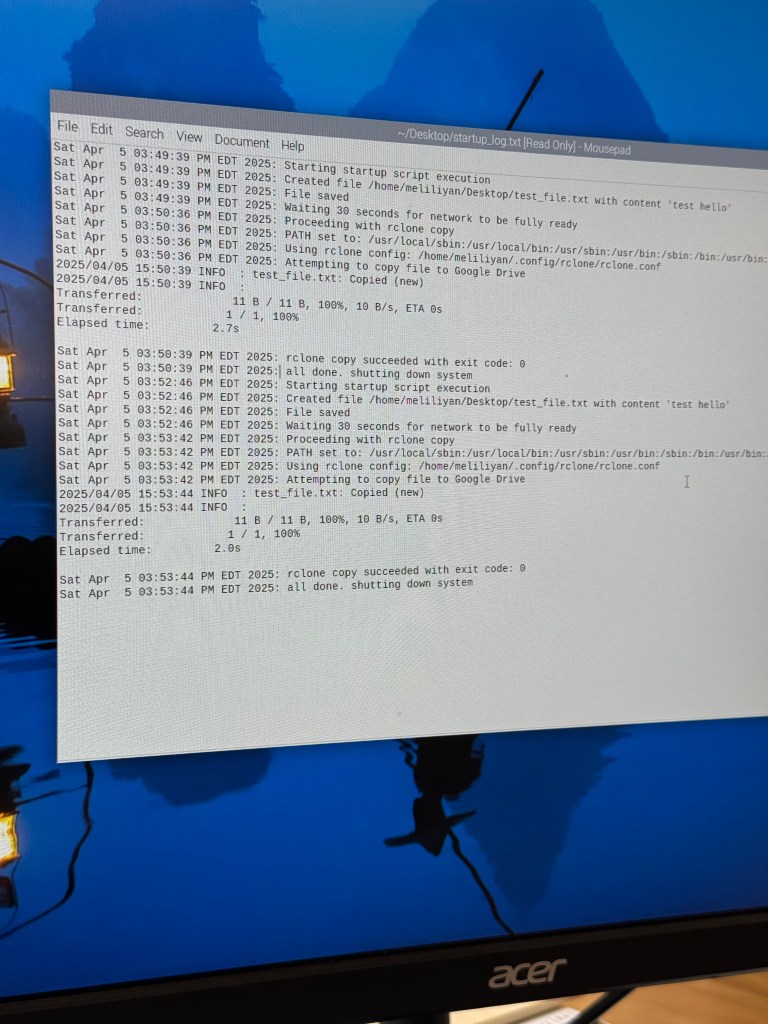
Figured out how to wire two solar panels in parallel together

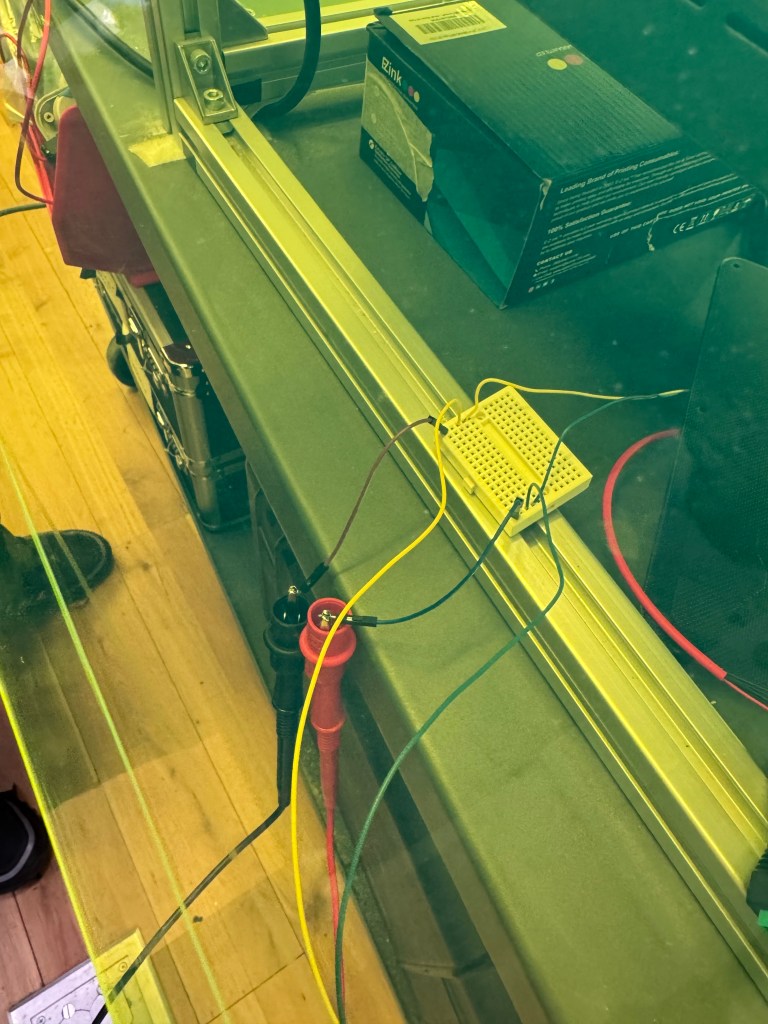
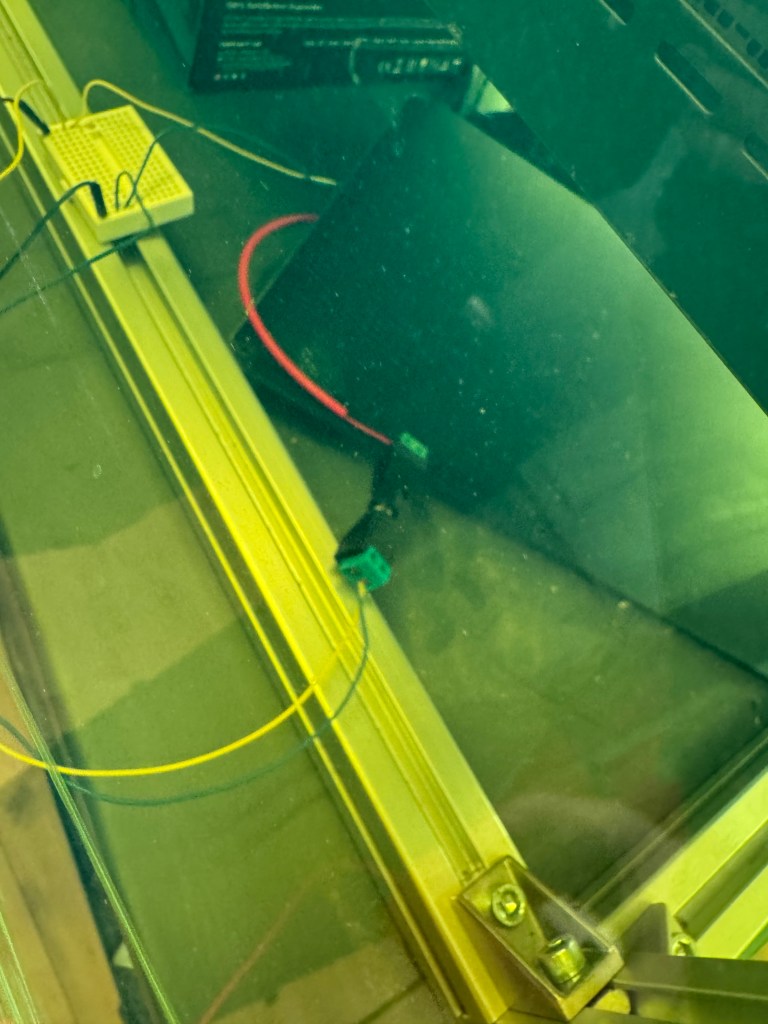
Voltage of above: 6.76 Volts
Discussed website design/experience
–do we give users ability to request radio frequencies and images?
–Or just radio frequencies?
–What does the data pipeline look like?
–Potential pivot to SSTV interaction
–a cool example of SSTV encoding/decoding: https://open-weather.community/decode/
Ordered parts for antenna after revising design
Next Steps
- Build antenna and install
- Install solar panels wired together with battery and voltage reader
- Install pi with scripts and google drive link installed
- Integrate working cycle of MQTT request -> Arduino -> Pi -> SDR -> Google Drive upload
- Flesh out website design and start building with ready data
Also, I will need research and develop my presentation for next week’s class!

Leave a comment